 客服热线:
客服热线:























| 有效期至长期有效 | 最后更新2024-04-14 01:03 |
| 浏览次数1479 |
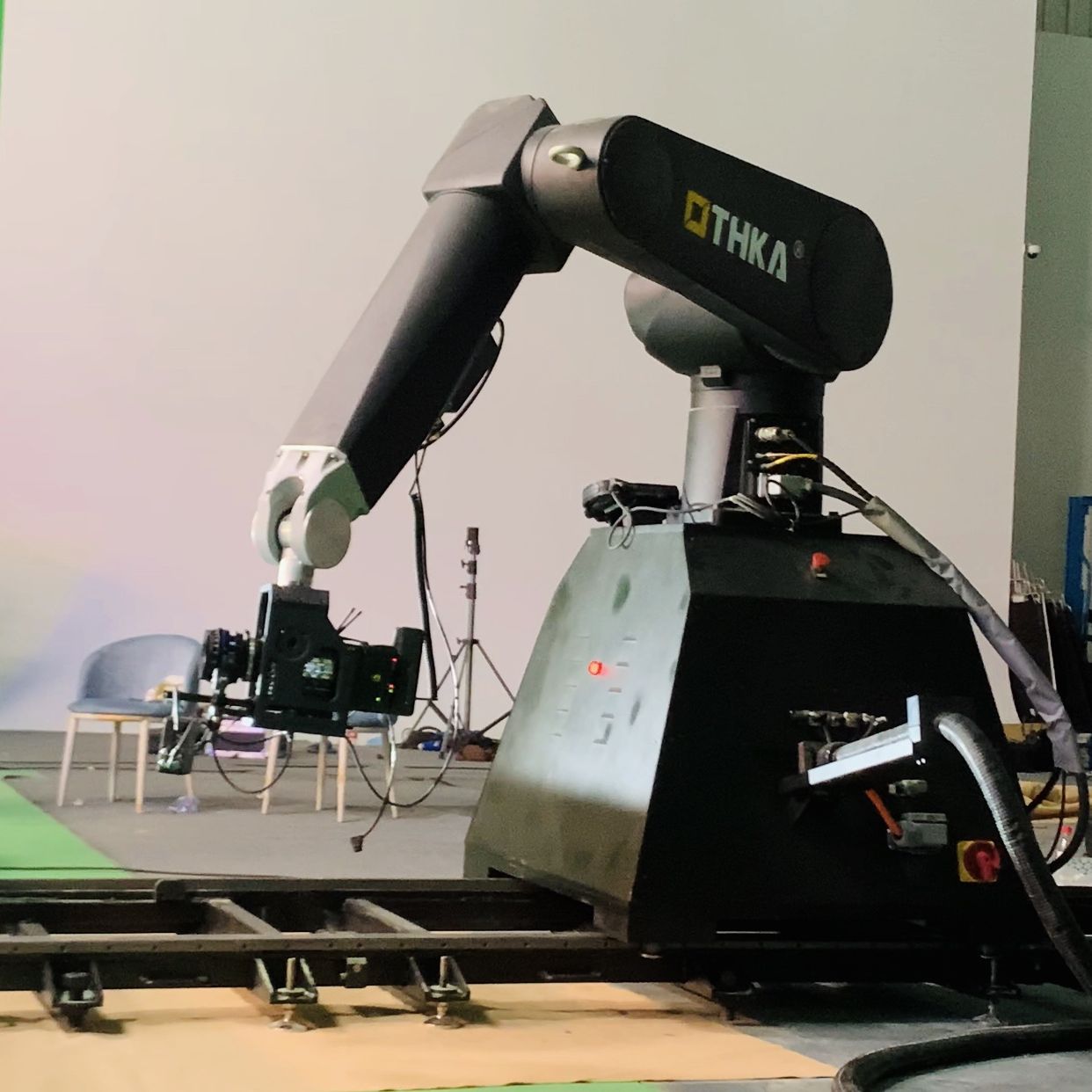
OTHKA MOCO机械臂 奥视佳摄像机运动控制系统 影视版机器人
一、 简介
奥视佳摄像机运动控制系统“影视版”(OTHKA MOCO)是一款针对影视特效、广告创意、虚拟直播、活动体验等研制的一种自动控制摄像机运动轨迹的拍摄设备。通过该设备,摄影师可以精确并重复地控制摄像机的运动轨迹,从而拍摄出多种特殊效果,如人物复制、高速拍摄、虚实结合、变速拍摄等。

二、功能特点
1) 轨迹设计
具备实时控制机械臂7自由度的运动(6旋转轴+1水平轴),包含单轴控制与末端控制,支持以关键帧的形式设计运动轨迹。
2) 运动方式
可自行定义摄影机运动轨迹关键帧之间的运动方式,包括直线运动、点到点运动、圆弧运动及各种组合等,轨迹的运动速度支持以“帧”为单位自行设定,轨迹支持重复执行及再编辑。
3) 镜头控制
集成镜头FOCUS、ZOOM控制方案,支持通用性镜头控制器Cmotion、TILTA(后续通过软件更新将适配更多跟焦器)。
4) 自动对焦
可以通过关键帧的方式设置指定对焦点,系统在运动过程中将自动对焦。
5)目标跟踪
可自定义拍摄目标,设置后执行运动轨迹的摄影机画面将始终围绕拍摄目标进行拍摄。
6) 水平锁定
开启此功能后摄影机运动轨迹将会始终保持水平状态。
7)轨迹预览
支持摄影机运动轨迹的可视化显示,可提前预览OTHKA各轴的运行方式,OTHKA实际运行轨迹与可视化显示轨迹的执行方式完全一致。
8)高速精确移动
轨道平移最大速度4.5米/秒,6旋转轴组合下最大速度12.3米/秒,精度高达0.05mm。

三、经典案例
OTHKA® MOCO目前多应用于影视、广告、直播等的数字特效拍摄与制作。在广告方面的案例,如《滴滴快车》、《京东家装节》、《东风启辰》、《徐福记》、《蘑菇街》等;在电影电视方面的案例,如《大主宰》、《热血男人帮》等;在大型虚拟直播方面的案例,如《小鹏P7发布会》、《DNF十二周年庆》等。


奥视佳摄像机运动控制系统KT20 | ||
序号 | 产品名称 | 参数 |
1 | 六轴机器人系统 | 包括机器人本体、机器人控制柜、示教器; 机器人本体参数: 工作半径1725mm;重复定位精度0.04mm; 本体重量230KG,最大负载20KG;运动轴数量为6个旋转轴; 基座旋转范围360度,速度190度/秒; 下臂摆动范围260度,速度205度/秒; 上臂摆动范围313度,速度210度/秒; 腕部旋转范围540度,速度400度/秒; 腕部摆动范围290度,速度360度/秒; 云台旋转范围720度,速度610度/秒。 |
包括机器人底座一个; 数字信号接口一套; 摄像机安装连接云台一个。 | ||
一根机器人动力线;一根380v电源线; 一根镜头控制线;一根网线;一根sdi线; 两个急停按钮。 | ||
2 |
运动控制主机 | 硬件:处理器i7,内存16G, 固态硬盘500G,采集卡; 摄像机运动控制系统控制软件:包含机器人与镜头的实时控制、镜头运行轨迹的编辑和虚拟仿真、机器人和镜头的精确同步重复运行、摄像机跟踪和水平锁定、用户权限管理、与VIZRT系统的数据对接等; a) 机器人实时控制 ★ 使用网络通讯实时控制机器人,可采取单轴与末端两种控制方式,通讯周期稳定,最高可以达到4ms的通讯间隔。 b) 镜头实时控制 ★具备对广播级摄像机Fujinon、Canon全伺服镜头控制器的直接控制功能,同时支持cmotion、tilta外置镜头控制器对镜头的焦距和对焦进行实时精确控制。具备轨迹运行过程中变焦、对焦的自动化处理功能。 c) 镜头运行轨迹的编辑和虚拟仿真 ★ 设定摄像机运动轨迹关键帧,每条运动轨迹最大支持99个关键帧的保存,自动生成完整的运动轨迹。支持对轨迹运行时间、等待时间、运行方式等的设置,同时提供摄像机器人仿真可视化操作界面。 d) 机器人和镜头的精确同步运行 ★ 系统采用同步机制,控制机器人与镜头精确同步运动,实现整个拍摄过程的智能化。同时保存多条运动轨迹,实现不同轨迹的快速切换运行和精确重复运行,重复精度达到0.05mm。 e) 摄像机跟踪和水平 ★ 具备高精度的实时定位跟踪功能,支持摄像机始终对准静止的对象拍摄,位置和角度的误差小于5mm和0.3度。具备摄像机姿态水平锁定功能,使摄像画面能够始终保持水平。 f) 用户权限管理 ★ 具备用户管理功能,实行用户权限分级制度,对不同类型用户的权限提供编辑功能。 g) 对接外部系统 ★ 支持free-d协议,可与VIZRT等虚拟演播室系统对接。支持与MOSART等集控系统的对接,可由集控系统指定运行相关机位及轨迹。支持与UNREAL等主流渲染引擎对接,可保证虚拟摄像机与真实摄像机的位置和姿态精准匹配,误差小于2mm和0.1度,同时提供相应可视化的插件。 |

 企业资料通过官方认证认证
企业资料通过官方认证认证 


&title=(先生)&tel=&work=18211192402&email=&org=北京新美迪科技有限公司(影视器材网官方自营)&adr=北京市昌平区中兴路硅谷SOHO1号楼620室&url=http://cnrft.cnrft.com/)
 [第11年] 指数:10
[第11年] 指数:10


 通过官方认证认证
通过官方认证认证 









